
What is a Tool Center Point (TCP) and Why Does It Matter?
If you have ever watched an
industrial robot perform a flawless, continuous operation or interact with a
microscopic electronic component with perfect accuracy, you are witnessing the
magic of precise mathematical coordination.
However, out of the box, the robotic arm doesn't know if it's holding a
heavy-duty welding torch, a complex gripper or a delicate suction cup. All the robot's internal computer knows is the
exact location and orientation of its wrist—specifically, the center of its
mounting flange.
To bridge the gap between the robot's wrist and the actual work being done, we
use a critical concept in robotics called the Tool Center Point (TCP).
WHAT IS A TOOL CENTER POINT (TCP)?
In the simplest terms, the Tool Center Point (TCP) is the specific, mathematical point in space that the robot is programmed to move through its work environment. It is the absolute focal point of the robot's End-of-Arm Tooling (EOAT).
When you jog (manually move) a robot or write a program telling it to move to an exact X, Y, Z coordinate, the robot is moving the TCP to that coordinate, not the robot's wrist flange.
MORE THAN A POINT: A COORDINATE FRAME
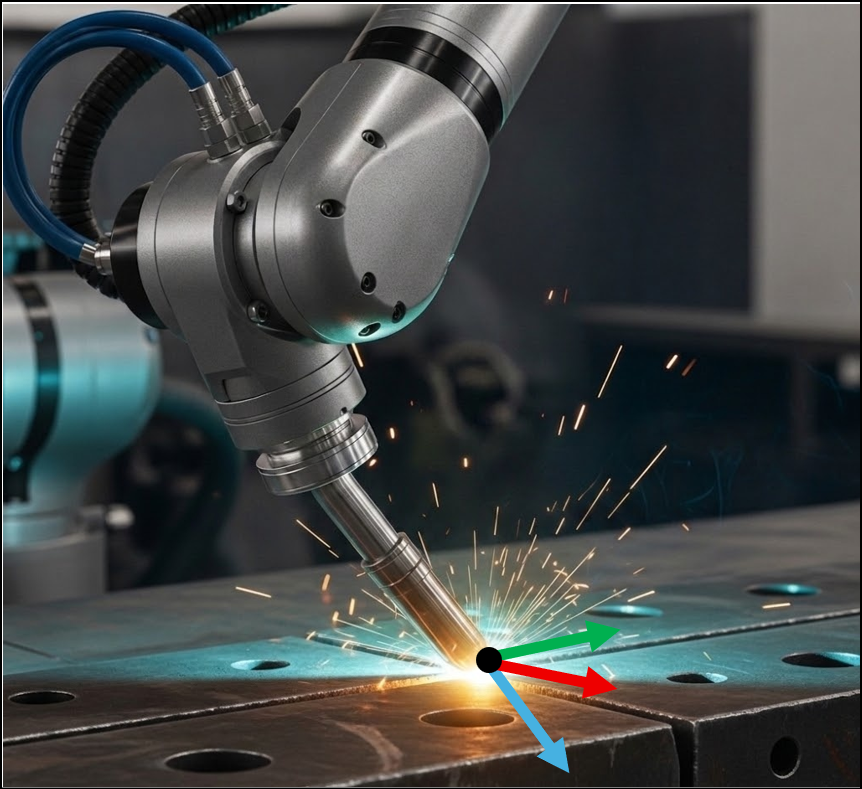
Looking closely at our main image, the TCP is not just a point. It is actually a frame providing direction (XYZ) and orientation (Rx, Ry, Rz) In our example:
- Red: The direction of the tool’s X direction
- Green: The direction of the tool’s Y direction
- Blue: The direction of the tool’s Z direction.
A FAMILIAR ANALOGY
Imagine you are holding a pen. If you want to draw a dot on a piece of paper, your brain doesn't focus on the position of your knuckles; it focuses on the very tip of the pen. In this analogy, your wrist is the robot's flange, and the tip of the pen is the TCP.
WHY IS THE TCP SO IMPORTANT?
Defining an accurate TCP is the foundational step of any successful robotic integration. If the TCP is off by even a fraction of a millimeter, the entire program will be flawed. Here is why it is critical:
1. ACCURATE PATH INTERPOLATION
When a robot is told to move in a perfectly straight line from point A to point B, the controller has to calculate the speed and angle of every single joint (from the base to the wrist) simultaneously to keep the tool moving straight. If the TCP is incorrect, the robot will move its wrist in a straight line, but the tip of the tool will drag or swing in an uncontrolled arc.
2. ROTATIONAL ORIENTATION (KEEPING THE TOOL ON TARGET)
Often, a robot needs to change its angle while keeping the tool in the exact same spot—think of a welding torch re-orienting its travel angle
- With a correct TCP: The robot's complex articulated arm sweeping around, but the tip of the tool remains perfectly stationary at the focal point.
- Without a TCP: The robot will rotate around its wrist, causing the tool to wildly swing away from the workpiece.
3. MAINTAINING CONSISTENT SPEEDS
In processes like dispensing
adhesives or laser cutting the speed of the tool relative to the surface must
remain perfectly constant. The robot
controller uses the TCP to calculate the linear speed of the tool frame
along its intended path. If the TCP
coordinates are wrong, the tool might move too fast around corners and too slow
on straightaways, ruining the application.
4. SIMPLIFIED REPROGRAMMING AND TOOL CHANGING
Many modern robots use automatic
tool changers to swap between entirely different tools (e.g., dropping a
complex dispenser to pick up a simple gripper). By simply telling the robot, "You
are now using Tool #2," the controller instantly shifts its
mathematical TCP frame to the new tool's tip. The path and orientation program
doesn't need to be rewritten; the robot simply recalculates its new joint
angles to achieve the same coordinate frame moves for the new TCP.
Imagine programming your robot to paint a widget. You can use tool #1 as your primer coat and
tool #2 as your color coat. You do not
need to create the same program twice as the paths will be the same. You can simply specify which tool TCP you
will be using for playback.
HOW IS A TCP DEFINED?
Good question! Check out our next blog post for just that.
Get in touch
-
contact@phaseonlineacademy.com